






移動中の位置が把握できて初めて機能するカーナビゲーション。見やすい地図表示や的確なルート誘導も、カーナビの根幹である自車位置精度の高さなくしては実現できません。しかし、車種や位置などの取付状況や走行時の環境変化など、あらゆる要因が複雑に影響し、正確な自車位置の把握を極めて困難にしています。
パイオニアは世界で初めて市販のGPSカーナビゲーションを発売(1990年5月新聞報道)して以来、長年に渡り正確に自車位置を認識するために研究を重ねてきました。あらゆるクルマで、どこに移動しても高精度を保ち続けることを目標に、独自のテクノロジー開発から地道な実走によるデータ収集まで、位置精度への取り組みを日々続けています。

あらゆる場所で正確に自車位置を認識
[ マルチフィールドマップマッチング ]
カーナビの位置精度が低下する原因のひとつに、道路以外の場所を正確に認識できないことが挙げられます。それはカーナビが「道路をトレースする」ことを前提に設計されているため、道路上にいないときでも最寄りの道路にマッチングしてしまうことの弊害でした。その問題を解決するために開発された、あらゆる場所で正確に自車位置を認識するロジックが「マルチフィールドマップマッチング」。自宅の駐車場など、身近な場所でも起こり得るわずかな自車位置のズレを抑えることが、道路の上での致命的な位置ズレの回避に大きく貢献しています。
道路上でないことを認識
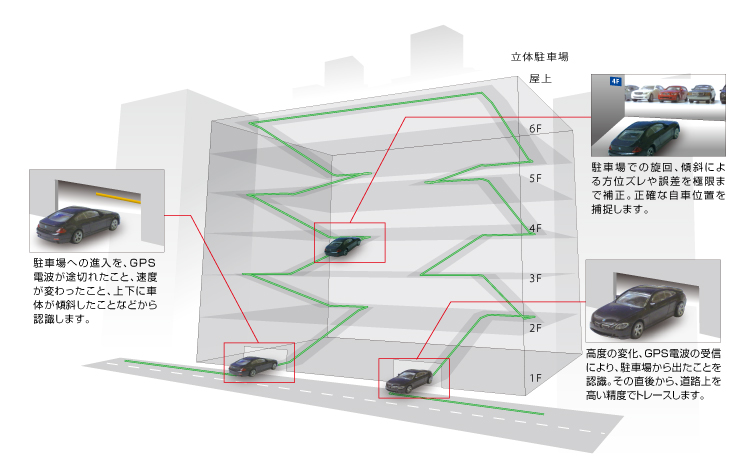
[ 駐車場モード ]
サイバーナビは自車位置を認識する際、単に緯度経度を計算しているのではありません。各種センサーや様々な信号から刻々と得られるデータを基に、旋回や速度変化などの車両の状態を速やかに考慮し、地図データと照合することで道路から外れたことを認識。駐車場や空き地などの道路以外の場所でも、自車位置を正確に表示します。
立体駐車場や地下駐車場にも対応
[ 傾斜旋回補正アルゴリズム ]
立体駐車場や地下駐車場は、自車位置を正確に表示することが非常に困難な環境だといえます。それは旋回や傾斜が多く、道路の傾斜角や高低差を自動的に検出するジャイロセンサーに生じた微妙な誤差が徐々に蓄積されるためです。しかもGPS電波が届かないため、方向がズレてしまうと修正する手段がありません。サイバーナビは、ジャイロセンサーの誤差を補正するために、「傾斜旋回補正アルゴリズム」を開発。長年に渡って培ってきたノウハウの積み重ねが可能にした感度補正のテクノロジーにより、駐車場マップが収録されていなくても、日本全国のありとあらゆる場所において、正確な自車位置表示を可能にしています。
駐車位置まで正確に表示
[ 駐車場マップ ]
全国主要都市の地下駐車場および立体駐車場120ヵ所の専用地図「駐車場マップ」を収録。クルマの傾斜や速度、道路データなど様々な要素を基に駐車場の出入口を感知すると自動的に切換わり、駐車場内でも駐車位置と自車位置が限りなく一致。エレベーターや階段の位置まで的確に把握することが可能です。さらに複数階の駐車場でも、走行階を判断して各階のマップを自動的に切換えて表示します。

▲駐車場マップ走行画面表示イメージ
コンビニの駐車場まで正確に認識
コンビニエンスストアのような道路近くの店舗に隣接する小規模な駐車場に進入した場合、周辺道路を曲がったのか駐車場に入ったのかが判別しにくいため、誤って周辺道路上に自車位置を表示してしまうことがあります。サイバーナビは、自動学習機能をもった自車位置自己診断システムにより、道路パターンと位置情報を照合して駐車場に入ったことを認識。駐車場の規模に関わらず、正確に自車位置を表示し続けます。

▲小規模駐車場 走行画面表示例
道路上を正確に表示
道路上を走行中は、表示される自車位置が道から外れない限り、位置ズレには気付きにくいものです。しかし、道から外れないようカーナビ内で単に近くの道路上に合わせている場合、前後方向の位置に大きな誤差があり、肝心の場面で困惑することがあります。サイバーナビは見た目だけでなく、実際の自車位置を正確に認識。表示することで、的確な誘導の実現を目指しています。
▲誤りやすいカーナビの自車位置表示
上下に重なり合った道路でも自車位置を把握
[ 3Dマップマッチング / 傾斜データ ]
高架上の高速道路とその下の一般道など、地図上で重なり合った道で自車位置を把握するには高度な技術が必要です。サイバーナビはこうした道路においても的確な自車位置表示を行うため、都市高速、都市間高速、一部の有料道路のジャンクションとインターチェンジ、主要国道、主要地方道の全国約6,000件の傾斜データを収録。実走行による計測データを基にした傾斜データと、各種センサーから認識した車両の傾きを照合し、走行している道路を正確に把握します。
▲3Dマップマッチングイメージ
狂いやすい進行方向の誤差を補正し認識
トンネル、立体交差や道路の傾斜、道路形状などにより進行方向の自車位置に誤差が生じないよう、様々なテクノロジーでサポートしています。
GPS測位位置を積極的に活用して誤差を解消
カーブした道路を走行する場合、複数車線の内側と外側、右カーブと左カーブなどによって、同じ道路を走行していても走行距離に差が発生します。タイヤの回転数を基にした車速パルスを活用するカーナビは、トンネル内などでGPS測位ができない場合、補正できないまま誤差が蓄積していくことがあります。サイバーナビはGPSセンサー情報を固定的に使用するのではなく、環境に応じて変化する情報の精度に応じて使い分けて活用。これにより進行方向の誤差を補正しています。
▲カーブによる走行距離の誤差イメージ
クルマの傾きまでも正確に把握する「クリスタル3Dハイブリッドセンサー」
カロッツェリアが独自に開発した「傾斜型ジャイロセンサー」と「傾斜型Gセンサー」を搭載。高速道路に入る上り坂や、地下駐車場に入る下り坂はもちろん、立体交差や道路のわずかな傾斜でも、傾斜角や高低差を自動的に検出し、実走行と地図上の間に生じる前後方向の位置誤差を補正します。さらに様々な車種への取付けを加味し、あらかじめ検出軸を傾けた状態に形成することで、上向き最大40度(下向き最大15度)までのコンソールの傾きに対応しています。
▲傾斜による自車位置の誤差イメージ
▲傾斜型ジャイロセンサー

▲傾斜型Gセンサー

▲車両の傾斜を正確に把握
夏冬のタイヤ交換やチェーン取付けにも対応
[ タイヤ外径変化検出機能 ]
カーナビは、タイヤの回転数を基に検出される車速パルス信号を活用するため、タイヤ外径のわずかな変化にも自車位置は影響を受けてしまいます。サイバーナビは「タイヤ外径変化検出機能」により、タイヤの微細な変化や、夏/冬のタイヤ交換時、チェーン装着時の形状の違いまで自動的に感知し、距離の学習値を速やかに補正。自車位置のズレが起こらないよう常に監視しています。
▲チェーン装着時の外径変化イメージ
リアルタイムに自車位置を表示
リアルタイムに正確な自車位置を表示し続けるため、常に測位を行い、表示位置の補正にも取り組んでいます。
表示までの時間差を解消する「表示位置補正」
自車位置を特定するには、様々な情報を基にした複雑な内部処理が必要なため、どうしても一定時間の表示遅れは免れません。サイバーナビは約1秒間の表示遅延を補正するため、あらかじめ描画時点の位置を表示。しかも単に前方へ進めるのではなく、車速に応じて補正距離を計算し、画面描画するタイミングに合わせた自車位置を表示します。
▲表示位置補正比較イメージ
スピーディに自車位置を追随する「10Hz測位」
走行時のクルマは常に進行しているため、表示更新の間隔が短ければ短いほどリアルタイムな動きまで表すことができます。サイバーナビは走行中も、1秒間に10回というスピードで自車位置の測位を実施。カーブ走行時や誤認識しやすい分岐などでも自車位置が滑らかに地図上の道をたどります。
▲10Hz測位/5Hz測位比較イメージ
高い自車位置精度を実現するテクノロジー
どの場所でもどんなクルマでも高精度を保つために、その要となる数々のテクノロジーを搭載しています。
都市部など高層ビルが建ち並ぶ場所でも正確に受信
[ リアルハイブリッドマルチパス検出・除去 ]
人工衛星から発信されるGPS電波は、高層ビルなどに反射することで測位誤差(マルチパス)を招く場合があります。サイバーナビはGPS電波から得られるGPS速度と車両信号から得られるセンサー速度の差を監視し、この自車位置精度の劣化原因ともなる測位誤差を検出、除去。入り組んだビルが建ち並ぶ都市部などでも正確にGPS電波の情報を受信します。
▲測位誤差の原因となるビルからの反射イメージ

▲GPS受信状況画面表示例
車両情報の微妙な変化まで検知して補正
[ センサー学習補正 ]
車両から得られる自車位置情報をとりまく環境は常に一定ではありません。サイバーナビは精度誤差の算出補正の要である3Dハイブリッドセンサーを常に監視し、学習補正を促すことで、高い自車位置精度を保ち続けることを可能にしています。
独自に膨大な道を調べて誤差を排除
[ 地図データ ]
位置精度に関わる様々なテクノロジーを発揮させるには、正確な道路データの整備が欠かせません。カロッツェリアでは並走する高速道路と一般道路の傾斜データ、立体駐車場や地下駐車場のデータなどに加え、幹線道路から細街路まで、あらゆる道路の正確な地図表示や自車位置精度に影響する地図データを積極的に整備。サイバーナビには累計約200万kmにおよぶ道路調査で得た、現地調査でしかわからないリアルで詳細な情報を反映して収録。幹線道路から細街路まで網羅した正確な道路データが、自車位置の精度を支えています。

▲詳細市街地図表示例


▲道路は続いているが通行止や階段になっている地点が存在
▲現地調査で地図データとして整備された例(紫色の部分)
起動時から短時間ですばやく自車位置を表示
[ 精度専用チップ ]
精度専用チップに採用されているサーチエンジンは、カーナビ起動時から自車位置把握に必要な衛星の捕捉を短時間で行い、速やかな自車位置表示を実現します。

▲精度専用チップ
細かなセッティングなしに、クルマに合わせて自動補正
[ 取付角度設定機能 ]
コンソールが大きく左右を向いた車種でも進行方向にまっすぐ取付けた場合と同じように、正確な自車位置が認識できるよう補正する「取付角度設定機能」。左右いずれかのカーブ走行時のみ極端に発生する誤差を徹底的に排除します。
また様々な車種への取付けに配慮し、上向き最大40度、下向き最大15度まで対応。しかも路面とナビ本体の取付角度を1度単位まで自動的に認識するので、手間の掛かる初期設定や調整を一切することなく走行時のクルマの傾きを正確に把握できます。
▲取付角度補正設定画面例
▲正確な取付角度を自動認識
※車速パルスを接続しない場合は簡易ハイブリッドとなり、2Dの平面的なハイブリッド測位となるためIQ高精度となりません。長いトンネルに入った場合は正確な測位ができなくなるなることがあります。
